|
|
Unet 背景介绍:
Unet 发表于 2015 年,属于 FCN 的一种变体。Unet 的初衷是为了解决生物医学图像方面的问题,由于效果确实很好后来也被广泛的应用在语义分割的各个方向,比如卫星图像分割,工业瑕疵检测等。
Unet 跟 FCN 都是 Encoder-Decoder 结构,结构简单但很有效。Encoder 负责特征提取,你可以将自己熟悉的各种特征提取网络放在这个位置。由于在医学方面,样本收集较为困难,作者为了解决这个问题,应用了图像增强的方法,在数据集有限的情况下获得了不错的精度。
Unet 网络结构与细节
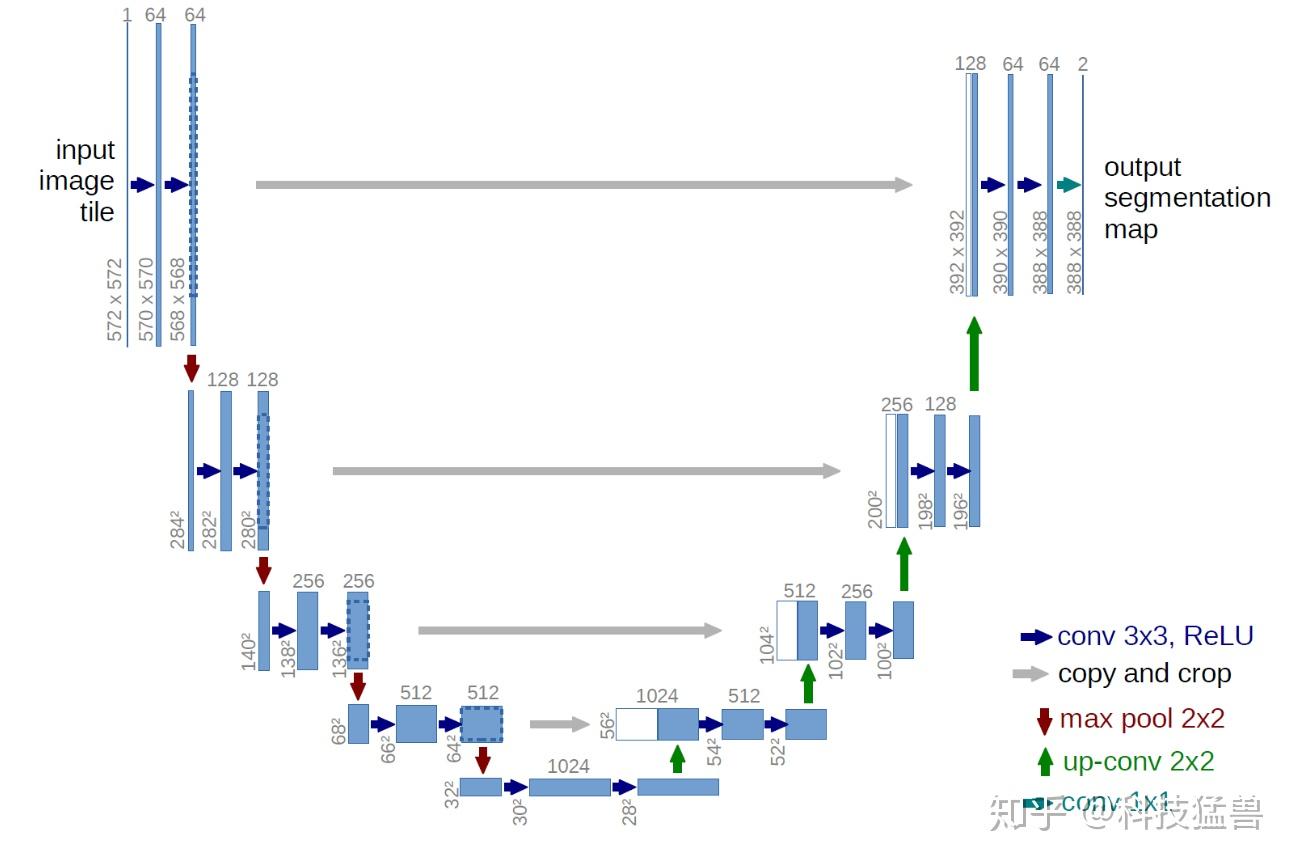
如上图,Unet 网络结构是对称的,形似英文字母 U 所以被称为 Unet。整张图都是由蓝/白色框与各种颜色的箭头组成,其中,蓝/白色框表示 feature map;蓝色箭头表示 3x3 卷积,用于特征提取;灰色箭头表示 skip-connection,用于特征融合;红色箭头表示池化 pooling,用于降低维度;绿色箭头表示上采样 upsample,用于恢复维度;青色箭头表示 1x1 卷积,用于输出结果。其中灰色箭头copy and crop中的copy就是concatenate而crop是为了让两者的长宽一致
可能你会问为啥是 5 层而不是 4 层或者 6 层,emmm,这应该去问作者本人,可能对于当时作者拿到的数据集来说,这个层数的表现更好,但不代表所有的数据集这个结构都适合。我们该多关注这种 Encoder-Decoder 的设计思想,具体实现则应该因数据集而异。
Encoder 由卷积操作和下采样操作组成,文中所用的卷积结构统一为 3x3 的卷积核,padding 为 0 ,striding 为 1。没有 padding 所以每次卷积之后 feature map 的 H 和 W 变小了,在 skip-connection 时要注意 feature map 的维度(其实也可以将 padding 设置为 1 避免维度不对应问题),pytorch 代码:
nn.Sequential(nn.Conv2d(in_channels, out_channels, 3),
nn.BatchNorm2d(out_channels),
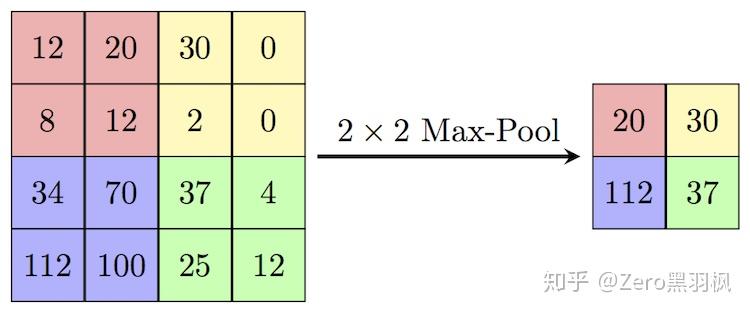
nn.ReLU(inplace=True))上述的两次卷积之后是一个 stride 为 2 的 max pooling,输出大小变为 1/2 *(H, W):
pytorch 代码:
nn.MaxPool2d(kernel_size=2, stride=2)上面的步骤重复 5 次,最后一次没有 max-pooling,直接将得到的 feature map 送入 Decoder。
feature map 经过 Decoder 恢复原始分辨率,该过程除了卷积比较关键的步骤就是 upsampling 与 skip-connection。
Upsampling 上采样常用的方式有两种:1.FCN 中介绍的反卷积;2. 插值。这里介绍文中使用的插值方式。在插值实现方式中,bilinear 双线性插值的综合表现较好也较为常见 。
双线性插值的计算过程没有需要学习的参数,实际就是套公式,这里举个例子方便大家理解(例子介绍的是参数 align_corners 为 Fasle 的情况)。
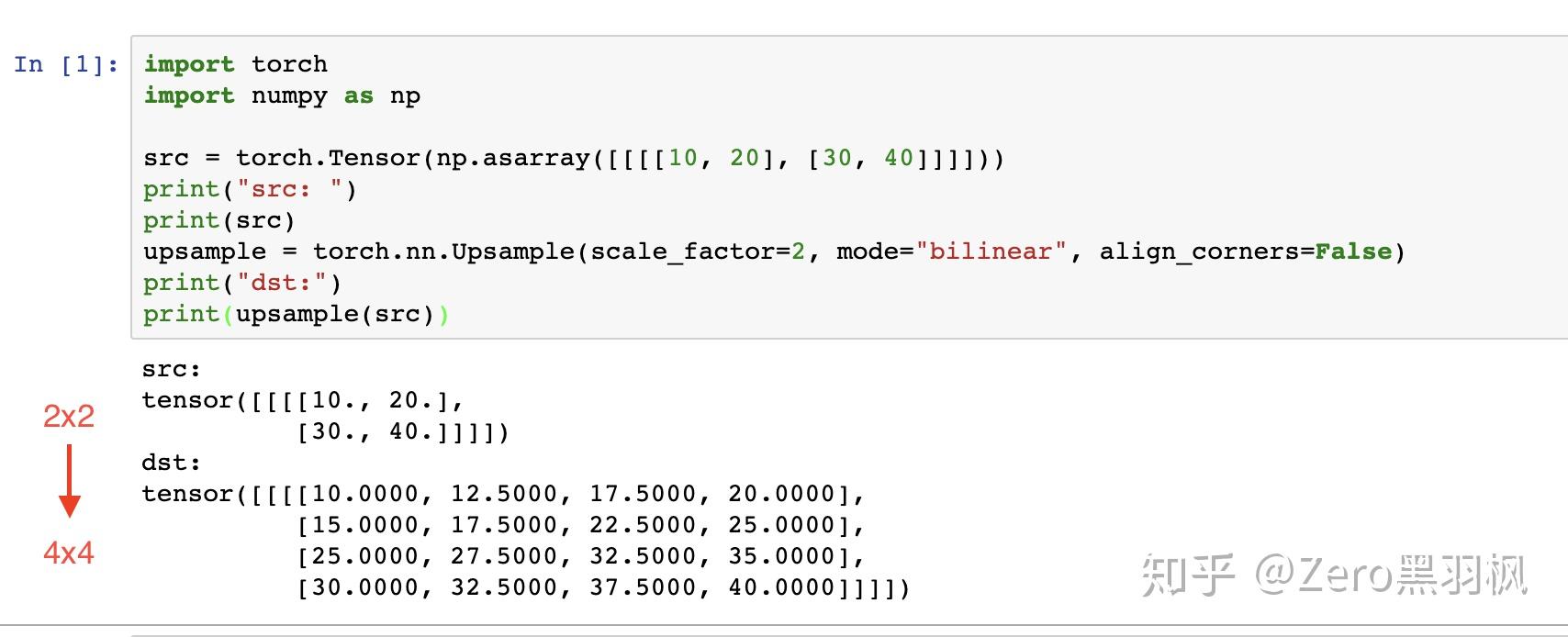
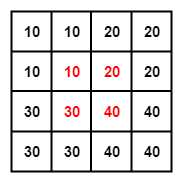
例子中是将一个 2x2 的矩阵通过插值的方式得到 4x4 的矩阵,那么将 2x2 的矩阵称为源矩阵,4x4 的矩阵称为目标矩阵。双线性插值中,目标点的值是由离他最近的 4 个点的值计算得到的,我们首先介绍如何找到目标点周围的 4 个点,以 P2 为例。
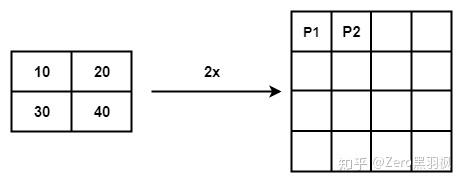
第一个公式,目标矩阵到源矩阵的坐标映射:
X_{src} = (X_{dst} +0.5)*(\frac{Width_{src}}{Width_{dst}}) - 0.5
Y_{src} = (Y_{dst} +0.5)*(\frac{Height_{src}}{Height_{dst}}) - 0.5
为了找到那 4 个点,首先要找到目标点在源矩阵中的相对位置,上面的公式就是用来算这个的。P2 在目标矩阵中的坐标是 (0, 1),对应到源矩阵中的坐标就是 (-0.25, 0.25)。坐标里面居然有小数跟负数,不急我们一个一个来处理。我们知道双线性插值是从坐标周围的 4 个点来计算该坐标的值,(-0.25, 0.25) 这个点周围的 4 个点是(-1, 0), (-1, 1), (0, 0), (0, 1)。为了找到负数坐标点,我们将源矩阵扩展为下面的形式,中间红色的部分为源矩阵。
我们规定 f(i, j) 表示 (i, j)坐标点处的像素值,对于计算出来的对应的坐标,我们统一写成 (i+u, j+v) 的形式。那么这时 i=-1, u=0.75, j=0, v=0.25。把这 4 个点单独画出来,可以看到目标点 P2 对应到源矩阵中的相对位置。

第二个公式,也是最后一个。
f(i + u, j + v) = (1 - u) (1 - v) f(i, j) + (1 - u) v f(i, j + 1) + u (1 - v) f(i + 1, j) + u v f(i + 1, j + 1)
目标点的像素值就是周围 4 个点像素值的加权和,明显可以看出离得近的权值比较大例如 (0, 0) 点的权值就是 0.75*0.75,离得远的如 (-1, 1) 权值就比较小,为 0.25*0.25,这也比较符合常理吧。把值带入计算就可以得到 P2 点的值了,结果是 12.5 与代码吻合上了,nice。
pytorch 里使用 bilinear 插值:
nn.Upsample(scale_factor=2, mode='bilinear')CNN 网络要想获得好效果,skip-connection 基本必不可少。Unet 中这一关键步骤融合了底层信息的位置信息与深层特征的语义信息,pytorch 代码:
torch.cat([low_layer_features, deep_layer_features], dim=1)这里需要注意的是,FCN 中深层信息与浅层信息融合是通过对应像素相加的方式,而 Unet 是通过拼接的方式。
那么这两者有什么区别呢,其实 在 ResNet 与 DenseNet 中也有一样的区别,Resnet 使用了对应值相加,DenseNet 使用了拼接。个人理解在相加的方式下,feature map 的维度没有变化,但每个维度都包含了更多特征,对于普通的分类任务这种不需要从 feature map 复原到原始分辨率的任务来说,这是一个高效的选择;而拼接则保留了更多的维度/位置 信息,这使得后面的 layer 可以在浅层特征与深层特征自由选择,这对语义分割任务来说更有优势。
<hr/>代码解读:
网络模块定义:
import torch
import torch.nn as nn
import torch.nn.functional as F
class DoubleConv(nn.Module):
&#34;&#34;&#34;(convolution => [BN] => ReLU) * 2&#34;&#34;&#34;
def __init__(self, in_channels, out_channels, mid_channels=None):
super().__init__()
if not mid_channels:
mid_channels = out_channels
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1),
nn.BatchNorm2d(mid_channels),
nn.ReLU(inplace=True),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.double_conv(x)
class Down(nn.Module):
&#34;&#34;&#34;Downscaling with maxpool then double conv&#34;&#34;&#34;
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
class up(nn.Module):
&#39;&#39;&#39; up path
conv_transpose => double_conv
&#39;&#39;&#39;
def __init__(self, in_ch, out_ch, Transpose=False):
super(up, self).__init__()
# would be a nice idea if the upsampling could be learned too,
# but my machine do not have enough memory to handle all those weights
if Transpose:
self.up = nn.ConvTranspose2d(in_ch, in_ch//2, 2, stride=2)
else:
# self.up = nn.Upsample(scale_factor=2, mode=&#39;bilinear&#39;, align_corners=True)
self.up = nn.Sequential(nn.Upsample(scale_factor=2, mode=&#39;bilinear&#39;, align_corners=True),
nn.Conv2d(in_ch, in_ch//2, kernel_size=1, padding=0),
nn.ReLU(inplace=True))
self.conv = double_conv(in_ch, out_ch)
self.up.apply(self.init_weights)
def forward(self, x1, x2):
&#39;&#39;&#39;
conv output shape = (input_shape - Filter_shape + 2 * padding)/stride + 1
&#39;&#39;&#39;
x1 = self.up(x1)
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = nn.functional.pad(x1, (diffX // 2, diffX - diffX//2,
diffY // 2, diffY - diffY//2))
x = torch.cat([x2,x1], dim=1)
x = self.conv(x)
return x
@staticmethod
def init_weights(m):
if type(m) == nn.Conv2d:
init.xavier_normal(m.weight)
init.constant(m.bias,0)
class OutConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)网络结构整体定义:
class Unet(nn.Module):
def __init__(self, in_ch, out_ch, gpu_ids=[]):
super(Unet, self).__init__()
self.loss_stack = 0
self.matrix_iou_stack = 0
self.stack_count = 0
self.display_names = [&#39;loss_stack&#39;, &#39;matrix_iou_stack&#39;]
self.gpu_ids = gpu_ids
self.bce_loss = nn.BCELoss()
self.device = torch.device(&#39;cuda:{}&#39;.format(self.gpu_ids[0])) if torch.cuda.is_available() else torch.device(&#39;cpu&#39;)
self.inc = inconv(in_ch, 64)
self.down1 = down(64, 128)
# print(list(self.down1.parameters()))
self.down2 = down(128, 256)
self.down3 = down(256, 512)
self.drop3 = nn.Dropout2d(0.5)
self.down4 = down(512, 1024)
self.drop4 = nn.Dropout2d(0.5)
self.up1 = up(1024, 512, False)
self.up2 = up(512, 256, False)
self.up3 = up(256, 128, False)
self.up4 = up(128, 64, False)
self.outc = outconv(64, 1)
self.optimizer = torch.optim.Adam(self.parameters(), lr=1e-4)
# self.optimizer = torch.optim.SGD(self.parameters(), lr=0.1, momentum=0.9, weight_decay=0.0005)
def forward(self):
x1 = self.inc(self.x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x4 = self.drop3(x4)
x5 = self.down4(x4)
x5 = self.drop4(x5)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
x = self.outc(x)
self.pred_y = nn.functional.sigmoid(x)
def set_input(self, x, y):
self.x = x.to(self.device)
self.y = y.to(self.device)
def optimize_params(self):
self.forward()
self._bce_iou_loss()
_ = self.accu_iou()
self.stack_count += 1
self.zero_grad()
self.loss.backward()
self.optimizer.step()
def accu_iou(self):
# B is the mask pred, A is the malanoma
y_pred = (self.pred_y > 0.5) * 1.0
y_true = (self.y > 0.5) * 1.0
pred_flat = y_pred.view(y_pred.numel())
true_flat = y_true.view(y_true.numel())
intersection = float(torch.sum(pred_flat * true_flat)) + 1e-7
denominator = float(torch.sum(pred_flat + true_flat)) - intersection + 2e-7
self.matrix_iou = intersection/denominator
self.matrix_iou_stack += self.matrix_iou
return self.matrix_iou
def _bce_iou_loss(self):
y_pred = self.pred_y
y_true = self.y
pred_flat = y_pred.view(y_pred.numel())
true_flat = y_true.view(y_true.numel())
intersection = torch.sum(pred_flat * true_flat) + 1e-7
denominator = torch.sum(pred_flat + true_flat) - intersection + 1e-7
iou = torch.div(intersection, denominator)
bce_loss = self.bce_loss(pred_flat, true_flat)
self.loss = bce_loss - iou + 1
self.loss_stack += self.loss
def get_current_losses(self):
errors_ret = {}
for name in self.display_names:
if isinstance(name, str):
errors_ret[name] = float(getattr(self, name)) / self.stack_count
self.loss_stack = 0
self.matrix_iou_stack = 0
self.stack_count = 0
return errors_ret
def eval_iou(self):
with torch.no_grad():
self.forward()
self._bce_iou_loss()
_ = self.accu_iou()
self.stack_count += 1
小结:
Unet 基于 Encoder-Decoder 结构,通过拼接的方式实现特征融合,结构简明且稳定。
参考: |
|


 发表于 2023-1-8 11:26:57
发表于 2023-1-8 11:26:57