设为首页
收藏本站
切换到窄版
登录
立即注册
找回密码
搜索
搜索
本版
帖子
用户
快捷导航
论坛
BBS
C语言
C++
NET
JAVA
PHP
易语言
数据库
IE盒子
»
论坛
›
IE盒子
›
NET
›
解决方案 | AI+3D视觉引导周转箱/料箱拆垛,大幅提升物 ...
返回列表
发帖
查看:
179
|
回复:
1
解决方案 | AI+3D视觉引导周转箱/料箱拆垛,大幅提升物流效率
[复制链接]
沙尘暴友满拒群
沙尘暴友满拒群
当前离线
积分
28
4
主题
13
帖子
28
积分
新手上路
新手上路, 积分 28, 距离下一级还需 22 积分
新手上路, 积分 28, 距离下一级还需 22 积分
积分
28
发消息
发表于 2023-1-9 17:22:56
|
显示全部楼层
|
阅读模式
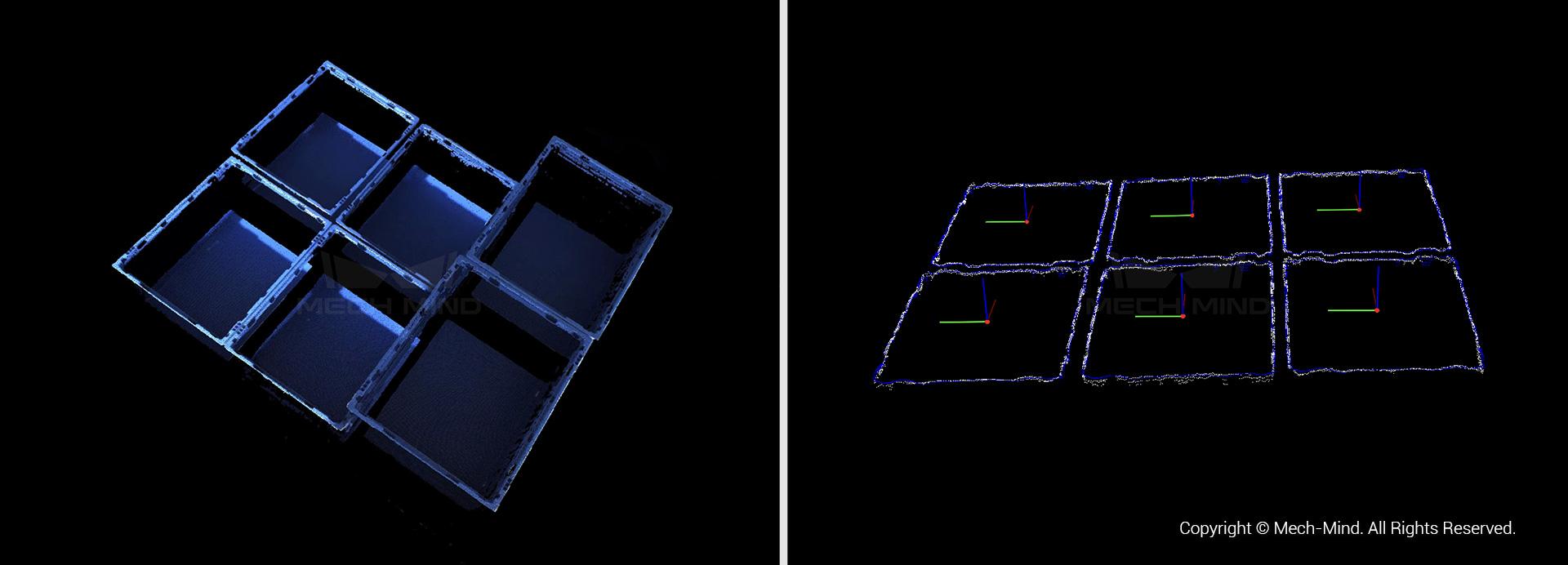
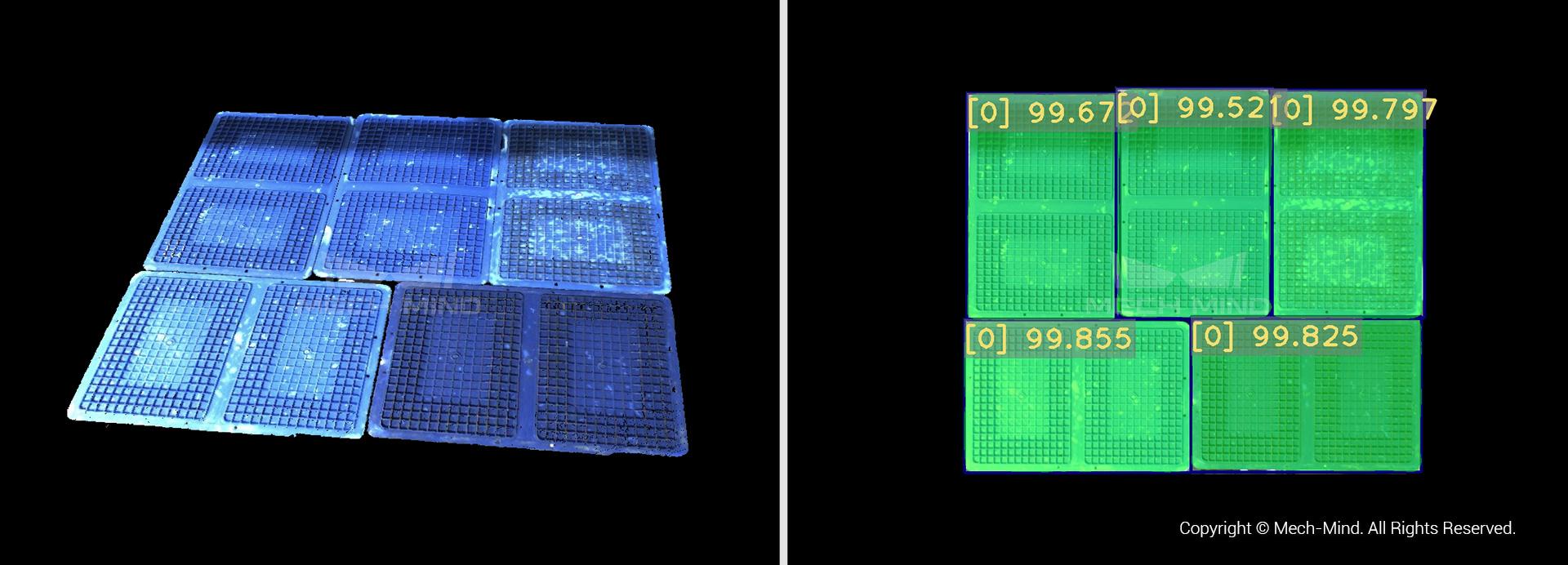
紧密贴合的周转箱正面点云图及识别结果图,Mech-Eye DEEP @ 2 m
紧密贴合的周转箱底面点云图及识别结果图,Mech-Eye DEEP @ 2 m
周转箱/料箱是重要的物流周转容器,广泛应用于厂内物流运输、中转、存储等环节。物料在周转过程中,催生了大量周转箱/料箱拆垛需求。
针对复杂多样的
周转箱/料箱拆垛
场景,梅卡曼德可提供
高效、稳定、柔性的AI+3D视觉方案
,帮助客户项目快速落地,实现厂内物流自动化升级。
应用难点
01箱体情况
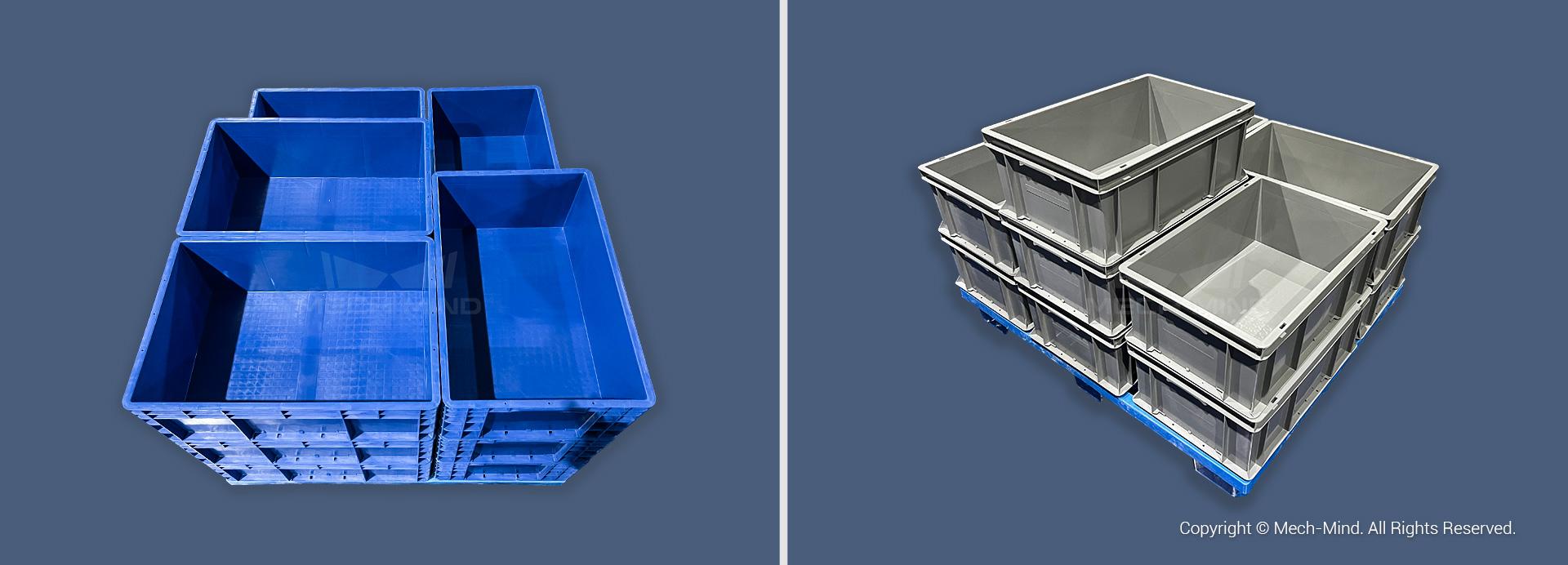
周转箱实物图
周转箱/料箱为塑料材质,侧壁厚度在2-8 mm不等;长期循环使用
易变形,一致性差
。对3D视觉系统精度及适应性要求高。
箱内多种物料乱序堆叠,可能存在
内容物反光、外溢
等情况,对视觉识别造成干扰。
抓取策略(如:外夹、内勾、拖拽式抓取等)需适应
箱体侧壁的复杂结构
。
02 来料情况
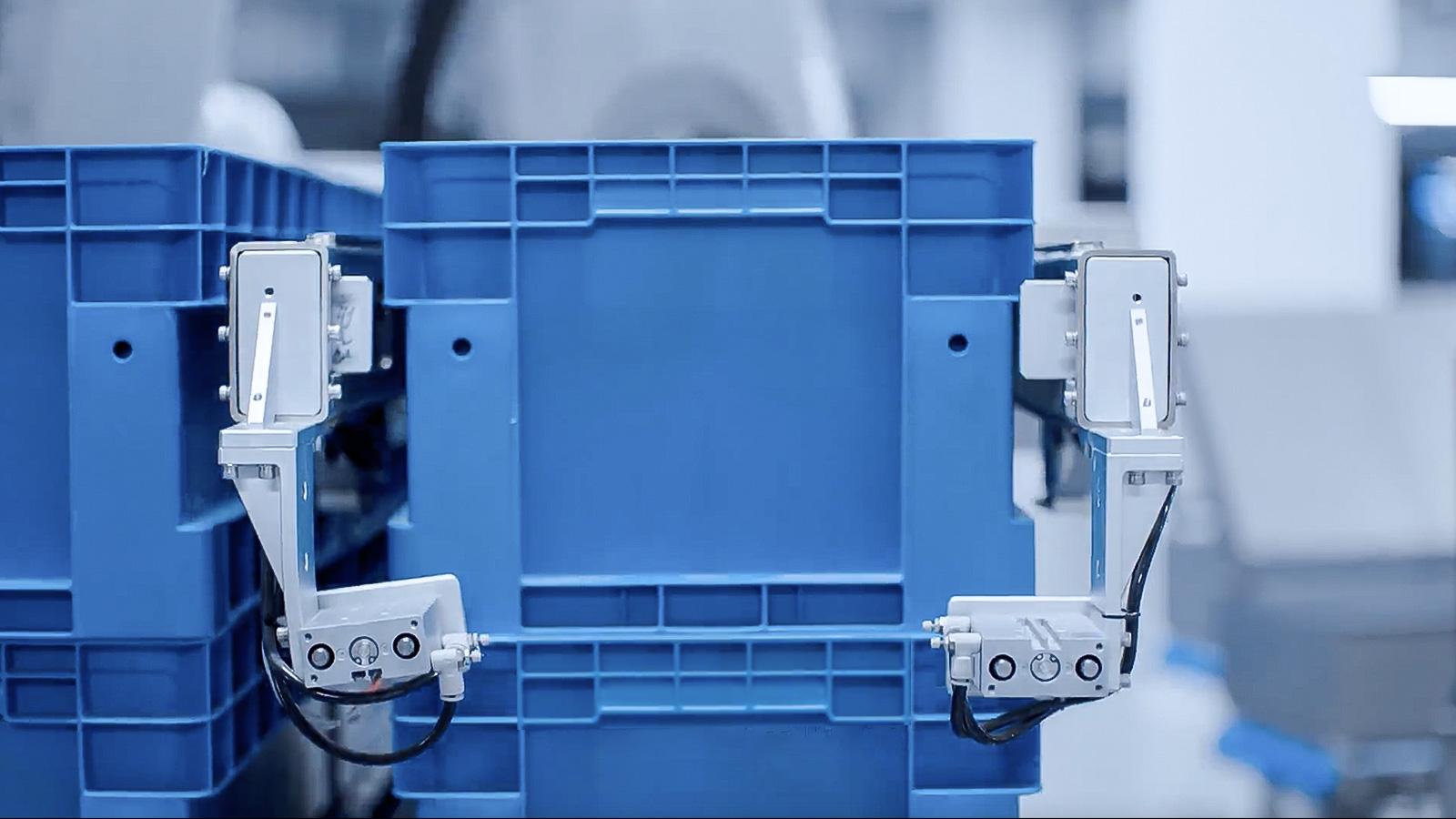
来料箱体紧密贴合&内容物反光
来料箱体紧密贴合。部分场景,不同大小的周转箱混合堆垛,视觉系统需准确识别箱体长、宽,
提前调节夹具行程
。
来料垛型不一致、箱体一致性差,机器人拆垛的方式精度低、效率低。
03 现场挑战
存在同一机器人应对多个工位、厂房顶高限制和机器人臂展不足等情况,
需合理规划3D相机安装方式
。
现场布局紧凑、对抓取顺序要求严格,视觉系统需具备
抓取规划、路径规划、碰撞检测
等能力。
存在阳光、灯光等环境光干扰,需要3D相机具备
优异的抗环境光性能
。
解决方案及优势
01 方案构成
梅卡曼德3D视觉引导周转箱/料箱拆垛系统由Mech-Eye工业级3D相机、Mech-Vision机器视觉软件、Mech-Viz机器人编程软件构成。
周转箱/料箱运输到位,PLC/机器人告知视觉系统进行拍照。
Mech-Eye对最高层箱体进行拍照,生成完整、细致、清晰的点云数据;Mech-Vision对点云进行处理(点云预处理、模板匹配、位姿矫正等),输出位姿,并根据需求进行箱体尺寸计算、垛型校验;Mech-Viz获取箱体位姿,进行碰撞检测、规划抓取,引导机器人执行拆垛作业。
直到整垛拆完,视觉系统上报拆垛完成信号,等待加料。
02 方案优势
无惧各类复杂环境 成像清晰完整
先进的成像算法,Mech-Eye在
典型厂房环境光干扰下(15000 lx-20000 lx)
,能够对壁薄的周转箱/料箱
高质量成像
。
Mech-Eye多种型号,支持远/中/近不同工作距离;体积紧凑,
满足复杂多样的安装环境
。梅卡曼德能够根据实际工况
为客户提供契合的3D相机及安装方案
。确保相机视野完整覆盖拍照区域,点云清晰完整。
依据现场情况,将相机安装于支架上,保证视野,柔性搬运
先进AI算法 应对各种来料形态
先进点云处理算法
,快速准确输出箱体位姿,引导机器人精准抓取。
性能强大的机器视觉软件,内置
AI算法
可应对
紧密贴合、一致性差、底面朝上的箱体
。内容物反光、外溢等情况亦不影响识别。
智能程度高 物料周转更稳定
可根据来料垛型,
智能规划抓取顺序及单次抓取数量
。
智能碰撞检测及运动轨迹规划
,更好应对现场布局紧凑等问题,提升厂内物料流通稳定性。
精确识别箱体长、宽,根据识别结果计算箱体尺寸,调节夹具行程;多抓时,视觉系统对箱体间距进行判断,小于设定阈值时报警,避免碰撞发生。
箱体间距判断
应用实例
某大型汽配厂 | 3D视觉引导周转箱拆垛
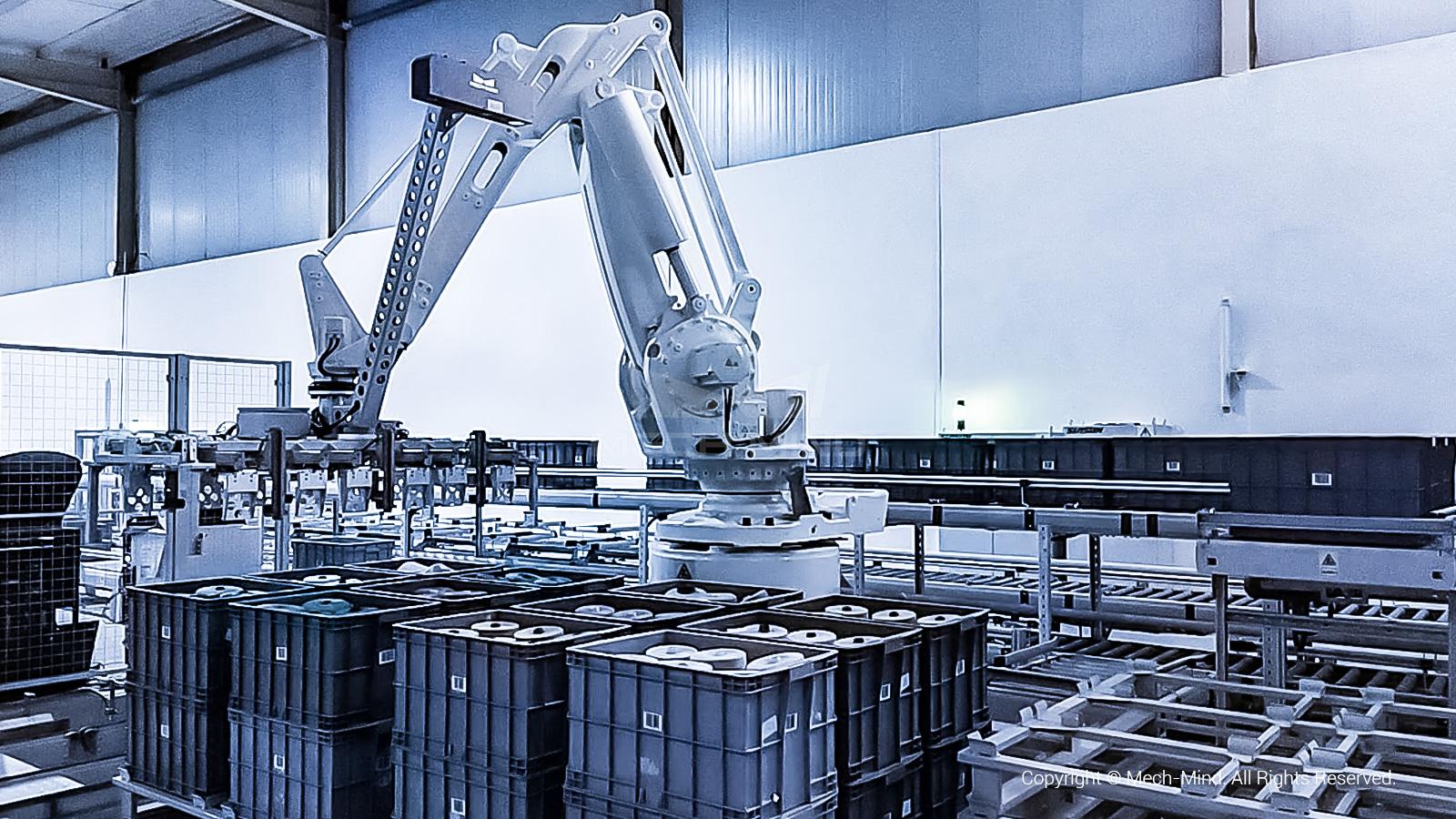
案例现场
拖拽式抓取
3D相机及安装方式:
Mech-Eye LSR L,臂载式安装。
满垛尺寸:
1200×1260×1470 mm(长×宽×高)。
项目亮点:
能够对壁薄、紧密贴合的周转箱输出精准位姿。
箱内存在高亮反光工件亦不影响识别。
拖拽式抓取,更好应对箱体紧密贴合、内壁光滑的情况。
某大型玩具制造商 | 3D视觉引导周转箱拆垛
3D相机及安装方式:
Mech-Eye DEEP,臂载式安装。
满垛尺寸:
1200×1000×2400 mm(长×宽×高)。
项目亮点:
Mech-Eye DEEP大视野,大景深,支持现场2.4 m的超高垛型。
深度学习算法可应对周转箱壁薄、紧密贴合、箱内零件干扰等情况。
可应对不同时段、不同强度的环境光干扰。
梅卡曼德已在全球物流场景落地1000+实际案例,应用范围涵盖
纸箱/麻袋/周转箱拆码垛、货品拣选、快递供包
等。如您想了解更多信息,或想咨询物流行业解决方案,请发送邮件至
info@mech-mind.net
。
回复
使用道具
举报
一撇一捺
一撇一捺
当前离线
积分
31
5
主题
15
帖子
31
积分
新手上路
新手上路, 积分 31, 距离下一级还需 19 积分
新手上路, 积分 31, 距离下一级还需 19 积分
积分
31
发消息
发表于 2025-4-11 05:15:25
|
显示全部楼层
1v1飘过
回复
使用道具
举报
返回列表
发帖
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
立即注册
本版积分规则
发表回复
回帖后跳转到最后一页
浏览过的版块
数据库
PHP
JAVA
快速回复
返回顶部
返回列表


 发表于 2023-1-9 17:22:56
发表于 2023-1-9 17:22:56